
-

CAPSULE AERATION SYSTEM (EHG)
Read more -

Capsule Dipping Bath
Read more -
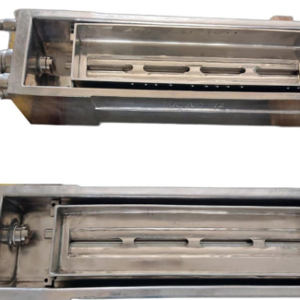
CAPSULE MACHINE DISH DRIVE (DIPPING BATH)
Read more -

CAPSULE SORTER (EHG)
Read more -
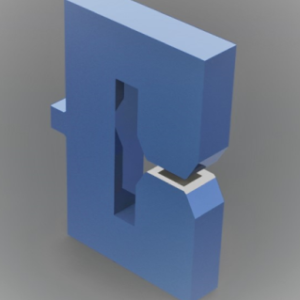
Dipole Magnet Assembly for SWLS
Read more -

EMPTY HARD GELATIN CAPSULE MACHINE
Read more -

Foreign Capsule Sorter Machine
Read more -

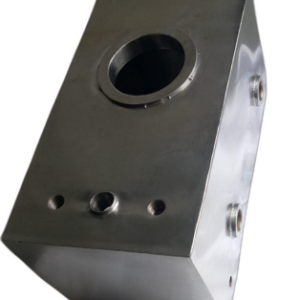
GIS ENCLOSURES
Read more -
INSULATED HOT WATER TANK (STAINLESS STEEL)
Read more -

MATERIAL HANDLING TROLLEYS (STAINLESS STEEL)
Read more -

Mechanical Support System for Pre-Prototype PM UNDULATOR
Read more -

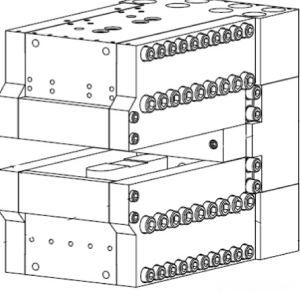
MULTI AXES POSITIONING SYSTEM 6DOF WITH PAYLOAD 10KN
Read more -

Post-Printed Capsule Sorter Machine
Read more -
SC-Magnet Core Assembly for Development of SWLS
Read more -
SP (Sextu-pole) Magnet Core Assembly.
Read more -

UNDULATOR Structure with servo controlled Jaw Movement Mechanism
Read more -

VACCUM COMPATIBLE VESSELS AND THEIR COMPONENTS
Read more